MuJoCo 安装
1. 概述
MuJoCo(Multi-Joint dynamics with Contact)是一种先进的物理仿真引擎,专为机器人学、生物力学和计算机动画等领域设计。它提供了高效、准确的物理模拟能力,支持复杂的关节结构、接触动力学和约束求解。
2. 系统环境要求
平台绝大多数镜像均已经满足了MuJoCo的安装要求,所以无需额外配置。如果希望使用特定Python版本,请参考Python多版本。
- 操作系统:Ubuntu 20.04 LTS 或更高版本
- Python:3.8 或更高版本
- pip:20.0 或更高版本
3. 安装步骤
建议使用使用 conda ,在桌面环境直接安装 MuJoCo,conda安装将会自动安装相关的依赖和命令。
bash
# 建议在图形界面的终端中进行
# 可以为mujoco单独创建一个conda环境
conda install mujoco4. 验证安装
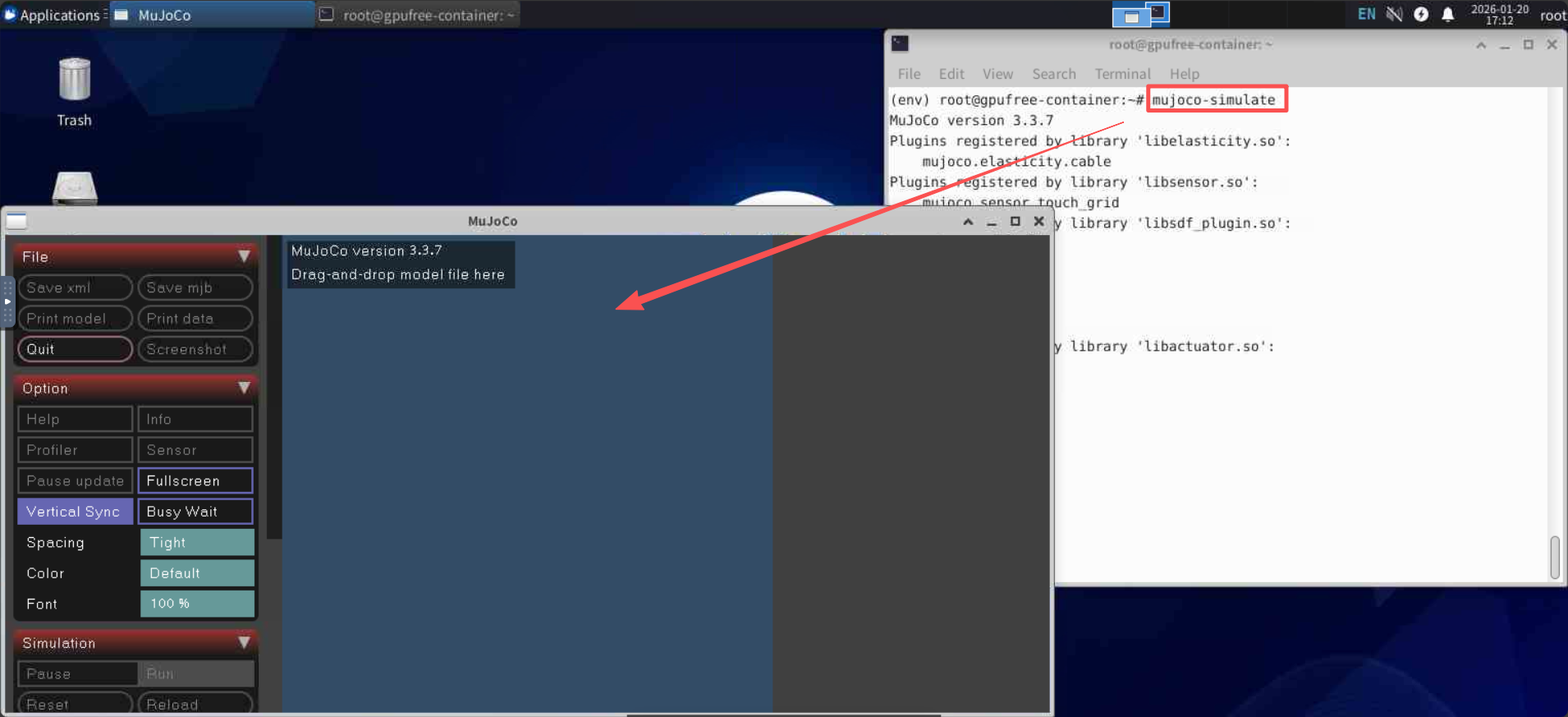
在桌面环境终端输入即可打开界面:
bash
mujoco-simulate